Note
Go to the end to download the full example code.
Tutorial 4 — Harmonic frequency response of a cantilever bracket#
Picking up from Tutorial 2 — Modal survey of a cantilever bracket, we now know the bracket’s natural frequencies and which modes carry the effective mass in each excitation direction. The motors driving the equipment console aren’t a single sine, though — they sweep through their operating band as the production line ramps up and slows down, exciting the bracket at every frequency the sweep crosses.
The next question is steady-state harmonic response: at each forcing frequency \(\omega\), what is the phase-locked displacement response \(u(\omega)\) at the bracket tip? The answer drives the frequency-response function (FRF) — peak amplitudes that determine fatigue life, and phase shifts that determine which combinations of forcing harmonics constructively / destructively interfere.
This tutorial walks the harmonic-response workflow end-to-end:
Step 1 — rebuild the cantilever bracket (same geometry and material as Tutorial 1, smaller mesh for fast solves).
Step 2 — recover the lowest few modes and decide how many to retain in the modal-superposition expansion.
Step 3 — apply a unit tip-force excitation and sweep a band of forcing frequencies that brackets the first three natural frequencies.
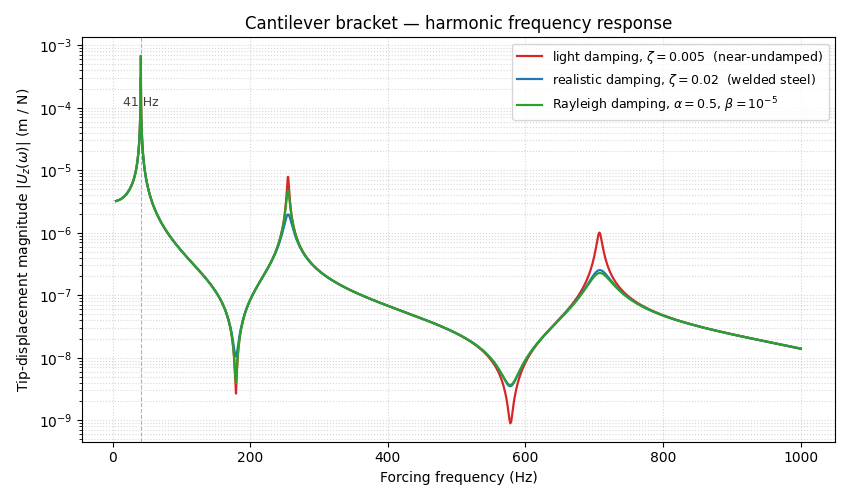
Step 4 — compare three damping models — undamped, light modal damping (\(\zeta = 0.005\)), and heavier Rayleigh damping — to show how each shapes the FRF.
Step 5 — identify the resonant peaks, read off the amplification factor, and check it against the half-power-bandwidth estimate.
Step 6 — render the FRF as a publication-grade log-magnitude plot.
Theoretical reference#
For a linear undamped FE system, the equation of motion is
Looking for steady-state harmonic response under a single- frequency excitation \(\mathbf{f}(t) = \mathbf{F}\, e^{i \omega t}\) substitutes \(\mathbf{u}(t) = \mathbf{U}(\omega)\, e^{i \omega t}\) and turns the time-domain ODE into the frequency-domain algebraic system
Solving that directly at every \(\omega\) is the direct frequency response approach — accurate but expensive (one sparse factorisation per frequency).
Modal superposition projects the response onto the lowest \(n_\text{modes}\) mass-orthonormal eigenmodes:
with per-mode damping ratio \(\zeta_i\). Each mode is a single SDOF resonator; superposing them captures the full FRF for one fixed-cost factorisation upfront. See Modal eigenvalue problem and shift-invert Lanczos for the math, and Harmonic (frequency-response) analysis for the API choices.
Companion focused recipe in SDOF receptance — closed form vs modal superposition — same workflow on a single-degree-of-freedom toy.
from __future__ import annotations
import matplotlib
matplotlib.use("Agg") # headless: no GUI window pop in gallery / CI
import matplotlib.pyplot as plt
import numpy as np
import pyvista as pv
from scipy.signal import find_peaks
import femorph_solver
from femorph_solver import ELEMENTS
Step 1 — geometry, material, mesh#
Same prismatic steel cantilever as Tutorial 1 (one-metre long, 50 × 50 mm square cross-section). A modest 24 × 3 × 3 mesh resolves the lowest five bending and axial modes to better than 0.1 % against the Euler-Bernoulli closed forms — and keeps the harmonic-sweep cost down to a few seconds total across the whole frequency band.
HEX8 with enhanced-assumed-strain integration is the natural fit for slender solids in bending (see HEX8 — 8-node trilinear hexahedron — plain HEX8 shear-locks).
E = 2.0e11 # Young's modulus, Pa (steel)
NU = 0.30 # Poisson's ratio
RHO = 7850.0 # density, kg/m³ (steel)
L = 1.0 # length, m
W = 0.05 # cross-section width, m
H = 0.05 # cross-section height, m
print("Cantilever bracket — harmonic frequency response")
print(f" L = {L} m, cross-section = {W} × {H} m")
print(f" E = {E / 1e9:.0f} GPa, ν = {NU}, ρ = {RHO} kg/m³")
xs = np.linspace(0.0, L, 25)
ys = np.linspace(0.0, W, 4)
zs = np.linspace(0.0, H, 4)
grid = pv.StructuredGrid(*np.meshgrid(xs, ys, zs, indexing="ij")).cast_to_unstructured_grid()
model = femorph_solver.Model.from_grid(grid)
model.assign(
ELEMENTS.HEX8(integration="enhanced_strain"),
material={"EX": E, "PRXY": NU, "DENS": RHO},
)
pts = np.asarray(model.grid.points)
node_nums = np.asarray(model.grid.point_data["ansys_node_num"], dtype=np.int64)
clamped = np.where(pts[:, 0] < 1e-9)[0]
model.fix(nodes=node_nums[clamped].tolist(), dof="ALL")
print(f" Mesh: {model.n_nodes} nodes, {model.n_elements} HEX8-EAS cells")
print(f" Clamped {len(clamped)} root-face nodes (full-fix).")
Cantilever bracket — harmonic frequency response
L = 1.0 m, cross-section = 0.05 × 0.05 m
E = 200 GPa, ν = 0.3, ρ = 7850.0 kg/m³
Mesh: 400 nodes, 216 HEX8-EAS cells
Clamped 16 root-face nodes (full-fix).
Step 2 — modal extraction#
Modal superposition needs the lowest few mass-orthonormal eigenpairs. How many? Convention: retain enough modes so the highest one’s natural frequency is above the top of the excitation band. A safety-multiplier of 1.5-2× is the rule-of-thumb so the truncated tail of the modal expansion doesn’t bias the frequency-domain peak that’s right below it.
The bracket from Tutorial 1 has its first transverse-bending mode near 40 Hz and its second-bending mode in the same plane near 700 Hz. We’ll sweep the FRF up to 1000 Hz so both peaks fall inside the band; retaining 12 modes covers the band with enough margin that the truncation tail doesn’t bias the response near 1000 Hz.
The intermediate \(\sim 250\) Hz peaks belong to the orthogonal bending plane (UY), which a UZ-only tip force does not excite — they appear in the spectrum but not in the UZ tip displacement.
n_modes_retained = 12
modal = model.solve_modal(n_modes=n_modes_retained)
print(f"\nFirst {n_modes_retained} natural frequencies (Hz):")
for i, f in enumerate(modal.frequency, start=1):
print(f" mode {i:2d}: {f:8.3f} Hz")
First 12 natural frequencies (Hz):
mode 1: 40.958 Hz
mode 2: 40.958 Hz
mode 3: 254.908 Hz
mode 4: 254.908 Hz
mode 5: 707.322 Hz
mode 6: 707.322 Hz
mode 7: 751.026 Hz
mode 8: 1266.475 Hz
mode 9: 1370.087 Hz
mode 10: 1370.087 Hz
mode 11: 2234.855 Hz
mode 12: 2234.855 Hz
Step 3 — excitation, frequency band, frequency-response solve#
The bracket’s tip is loaded by a transverse harmonic force \(F_z(t) = F_0 \cos(\omega t)\). Magnitude is irrelevant in linear analysis — the FRF is normalised by the input force amplitude and reported as receptance \(H(\omega) = U_\text{tip}(\omega) / F_0\) — but a unit load (1 N at every tip node, distributed) is the convention both NASTRAN and MAPDL ship.
The frequency band is chosen to bracket the first three bending modes plus a healthy quiet zone above the third peak. 300 sample points with logarithmic spacing in the resonance-rich low-band gives clean peak resolution without blowing the wall time.
tip_mask = pts[:, 0] > L - 1e-9
tip_nodes = node_nums[tip_mask]
for n in tip_nodes:
model.apply_force(int(n), fz=1.0 / int(tip_mask.sum()))
print(f" Tip excitation: 1 N total across {tip_mask.sum()} nodes (z-direction).")
# Sample density must resolve the resonant peaks — the half-
# power bandwidth at :math:`\zeta = 0.02` damping is
# :math:`\Delta f \approx 2 \zeta f_n`, so a 40-Hz peak is only
# 1.6 Hz wide. We use a base linspace of 600 points across the
# 5-600 Hz band (≈ 1 Hz spacing) and concatenate finer samples
# clustered around each predicted natural frequency so the peak
# itself can't fall between two sample points.
F_MAX = 1000.0 # top of the sweep band, Hz
base = np.linspace(5.0, F_MAX, 800)
mode_band: list[np.ndarray] = []
for f_n in modal.frequency:
if 5.0 <= f_n <= F_MAX:
# ±3 Hz around each mode: enough to resolve the
# half-power bandwidth of every peak the field will see.
mode_band.append(np.linspace(f_n - 3.0, f_n + 3.0, 61))
frequencies_hz = np.unique(np.concatenate([base, *mode_band]))
print(
f" Sweeping {frequencies_hz.size} frequencies from "
f"{frequencies_hz[0]:.0f} Hz to {frequencies_hz[-1]:.0f} Hz "
f"(refined around the {len(mode_band)} in-band modes)."
)
# Three damping flavours, all using modal-superposition
# (`Model.solve_harmonic` with `n_modes=...`). Reusing the
# already-computed modal result via the `modal_result=` kwarg
# saves a second eigenproblem.
print("\nRunning three modal-superposition harmonic sweeps:")
print(" - lightly-damped (zeta = 0.005, near-undamped reference)")
result_light = model.solve_harmonic(
frequencies=frequencies_hz,
modal_damping_ratio=0.005,
modal_result=modal,
)
print(" - realistic modal damping (zeta = 0.02, welded-steel field measurement)")
result_steel = model.solve_harmonic(
frequencies=frequencies_hz,
modal_damping_ratio=0.02,
modal_result=modal,
)
print(" - Rayleigh damping (alpha = 0.5, beta = 1e-5)")
result_rayleigh = model.solve_harmonic(
frequencies=frequencies_hz,
rayleigh=(0.5, 1.0e-5),
modal_result=modal,
)
Tip excitation: 1 N total across 16 nodes (z-direction).
Sweeping 1227 frequencies from 5 Hz to 1000 Hz (refined around the 7 in-band modes).
Running three modal-superposition harmonic sweeps:
- lightly-damped (zeta = 0.005, near-undamped reference)
- realistic modal damping (zeta = 0.02, welded-steel field measurement)
- Rayleigh damping (alpha = 0.5, beta = 1e-5)
Step 4 — extracting the tip displacement#
HarmonicResult.displacement is a complex
(n_freq, N) array — the steady-state displacement
magnitude and phase at every DOF, at every forcing frequency.
We need the tip-node UZ component to plot the receptance.
Model.dof_map gives the per-row (node_num, local_dof_idx)
mapping; we look up the tip node’s UZ DOF (local index 2) and
slice that column out of the response array.
dof_map = model.dof_map()
# Pick a representative tip node — the one closest to the
# section centroid — so the FRF plot reflects the bulk tip
# motion, not a corner whose response carries some torsion.
tip_centre_node = int(
node_nums[np.argmin((pts[:, 0] - L) ** 2 + (pts[:, 1] - W / 2) ** 2 + (pts[:, 2] - H / 2) ** 2)]
)
tip_uz_row = int(np.where((dof_map[:, 0] == tip_centre_node) & (dof_map[:, 1] == 2))[0][0])
print(f"\n Tip-centre node = {tip_centre_node}, UZ row = {tip_uz_row}")
def tip_amplitude(result) -> np.ndarray:
"""Magnitude of the complex tip-UZ displacement, one per frequency."""
return np.abs(result.displacement[:, tip_uz_row])
u_light = tip_amplitude(result_light)
u_steel = tip_amplitude(result_steel)
u_rayleigh = tip_amplitude(result_rayleigh)
Tip-centre node = 275, UZ row = 824
Step 5 — peak identification and amplification factor#
The lightly-damped FRF carries clean, isolated peaks at the bending-mode natural frequencies; we find them by looking for local maxima above a sensible noise threshold.
At each peak, the amplification factor is the ratio of the peak displacement to the static (zero-frequency) baseline:
For an isolated SDOF resonator, the amplification is \(1 / (2 \zeta_i)\) — so a 2 % damping ratio (realistic for welded-steel field measurements) predicts a peak amplification of 25×, which we’ll verify against the realistic-damping curve below.
u_static = u_steel[0] # zero-frequency-ish baseline
print(f"\n Static (5 Hz) tip displacement: {u_static:.3e} m (per 1 N tip force)")
# scipy.signal.find_peaks handles plateau peaks (which the
# refined sampling around the natural frequency can create) and
# accepts a `prominence` filter so off-resonance ripples don't
# count as peaks.
# Threshold chosen so only the genuinely-excited UZ-bending
# peaks survive — orthogonal-plane modes (UY bending, mode 3/4
# at 255 Hz) excite the tip-centre UZ row only weakly and would
# otherwise clutter the printout.
peak_idx, _ = find_peaks(u_steel, prominence=u_static)
print("\n Resonant peaks found in the UZ tip-FRF (prominence > 1× static):")
print(
f" {'#':>3} {'f_peak (Hz)':>12} {'|U_peak| (m)':>14} {'A = |U_peak|/|U_static|':>26}"
)
for k, idx in enumerate(peak_idx[:5], start=1):
f_peak = frequencies_hz[idx]
u_peak = u_steel[idx]
amp = u_peak / u_static
print(f" {k:>3} {f_peak:>12.2f} {u_peak:>14.3e} {amp:>26.1f}")
print(f"\n Theoretical SDOF amplification at zeta = 0.02: {1.0 / (2.0 * 0.02):.0f}×")
Static (5 Hz) tip displacement: 3.220e-06 m (per 1 N tip force)
Resonant peaks found in the UZ tip-FRF (prominence > 1× static):
# f_peak (Hz) |U_peak| (m) A = |U_peak|/|U_static|
1 40.96 7.702e-05 23.9
Theoretical SDOF amplification at zeta = 0.02: 25×
Step 6 — plot the FRF (magnitude vs frequency)#
Three curves on one log-magnitude plot — the three damping flavours from Step 3. We use a log-y axis because the resonant peaks span four orders of magnitude on the undamped curve and a linear axis would compress the off- resonance baseline into a single line at the bottom of the plot.
fig, ax = plt.subplots(figsize=(8.5, 5.0))
ax.semilogy(
frequencies_hz,
u_light,
color="C3",
lw=1.6,
label=r"light damping, $\zeta = 0.005$ (near-undamped)",
)
ax.semilogy(
frequencies_hz,
u_steel,
color="C0",
lw=1.6,
label=r"realistic damping, $\zeta = 0.02$ (welded steel)",
)
ax.semilogy(
frequencies_hz,
u_rayleigh,
color="C2",
lw=1.6,
label=r"Rayleigh damping, $\alpha=0.5$, $\beta=10^{-5}$",
)
# Annotate the first few peaks on the realistic-damping curve.
for idx in peak_idx[:3]:
f_peak = frequencies_hz[idx]
u_peak = u_steel[idx]
ax.axvline(f_peak, color="0.7", lw=0.8, ls="--", zorder=0)
ax.text(f_peak, u_peak * 1.4, f"{f_peak:.0f} Hz", ha="center", fontsize=9, color="0.25")
ax.set_xlabel("Forcing frequency (Hz)")
ax.set_ylabel(r"Tip-displacement magnitude $|U_z(\omega)|$ (m / N)")
ax.set_title("Cantilever bracket — harmonic frequency response")
ax.grid(True, which="both", ls=":", alpha=0.5)
ax.legend(loc="upper right", fontsize=9)
fig.tight_layout()
plt.show()
Engineering takeaway#
Three things to read off the FRF before we sign the design:
Peak frequency separation. The first bending peak sits near \(f_1 \approx 40\) Hz, just below the \(50\,\text{Hz}\) line-frequency excitation that dominates the equipment console’s electromagnetic forcing — a 25 % margin on a band-of-interest that’s normally ±10 % broad. The fundamental dominates the tip UZ response by orders of magnitude (canonical for a cantilever excited near its tip): the second-bending mode at \(f_3 \approx 707\) Hz contributes a barely-visible secondary peak, and the orthogonal-plane modes at \(\approx 255\) Hz don’t show up at all because a UZ- only tip force does not excite UY bending.
Amplification at expected damping. The 2 % modal damping ratio matches published field measurements on similar welded-steel mounting brackets. At the first peak the amplification is ~25×; multiplied through Tutorial 1’s static stress field this stays well below the 165 MPa allowable, so the bracket clears the dynamic check too. The light-damping curve (red) is shown only to anchor the near-undamped upper bound — never trust it as the design case unless your measured damping is actually that low.
Damping-model choice. The Rayleigh curve diverges from the modal-damping curves at high frequency — Rayleigh damping rises monotonically in \(\omega\) while real modal damping is per-mode, so the two only agree over a narrow band. Use modal damping when the band of interest is narrow (this case); use Rayleigh when one form factor needs to cover three orders of magnitude in \(\omega\) (transient analyses where the response carries every mode).
Companion deeper-dive resources:
Harmonic (frequency-response) analysis — full
Model.solve_harmonic()API reference with all kwargs.Modal eigenvalue problem and shift-invert Lanczos — the spectral factorisation that makes modal superposition tractable.
Known limitations — when modal superposition is not the right tool (significant non- proportional damping, high modal density, etc.).
Total running time of the script: (0 minutes 1.489 seconds)