Note
Go to the end to download the full example code.
Modal participation factors + effective modal mass#
For base-excitation analysis (seismic, shock, hard-mounted random vibration), the modal participation factor \(\Gamma_{i}\) and effective modal mass \(M_{\mathrm{eff},i}\) of each mode tell you which modes will respond when the structure is shaken in a given direction — and which can safely be ignored. Together they answer the practical engineering question:
How many modes do I need to capture 90 % of the response in the y direction?
Definitions (Bathe 2014 §9.3.4; Chopra 2017 §13.1):
with \(\phi_{i}\) the i-th mode shape (mode_shapes[:, i]),
\(M\) the consistent mass matrix, and \(r^{(d)}\) the
influence vector for direction \(d\) — a vector of ones
on every DOF in direction \(d\) and zeros elsewhere. When
mode shapes are mass-normalised (\(\phi^{T} M \phi = I\)),
the formulas simplify to
\(\Gamma_{i}^{(d)} = \phi_{i}^{T} M r^{(d)}\) and
\(M_{\mathrm{eff},i}^{(d)} = \Gamma_{i}^{(d) 2}\).
Total-mass property:
So the running cumulative sum of \(M_{\mathrm{eff},i}\) gives a clean diagnostic — the first \(k\) modes capture \(\sum_{i \le k} M_{\mathrm{eff},i}^{(d)} / M_{\mathrm{total}}\) of the structure’s response in direction \(d\).
Implementation#
A slender HEX8-EAS prismatic cantilever (the
CantileverHigherModes
geometry). Solve 12 modes, get \(M\) from
Model.mass_matrix(), build the X / Y / Z influence vectors,
and compute \(\Gamma\) + \(M_{\mathrm{eff}}\) for every
mode in every direction. Print a participation-factor table
sorted by mode number plus the cumulative-mass curve, and render
the cumulative bar chart.
References#
Bathe, K.-J. (2014) Finite Element Procedures, 2nd ed., Prentice Hall, §9.3.4 (mode-superposition + participation factors).
Chopra, A. K. (2017) Dynamics of Structures, 5th ed., Pearson, §13.1 — modal effective mass.
Cook, R. D., Malkus, D. S., Plesha, M. E., Witt, R. J. (2002) Concepts and Applications of Finite Element Analysis, 4th ed., Wiley, §11.6 — base excitation.
from __future__ import annotations
import numpy as np
import pyvista as pv
import femorph_solver
from femorph_solver import ELEMENTS
Build a slender cantilever beam (HEX8 EAS)#
E = 2.0e11
NU = 0.30
RHO = 7850.0
L = 4.0
WIDTH = 0.05
HEIGHT = 0.05
NX, NY, NZ = 60, 3, 3
xs = np.linspace(0.0, L, NX + 1)
ys = np.linspace(0.0, WIDTH, NY + 1)
zs = np.linspace(0.0, HEIGHT, NZ + 1)
grid = pv.StructuredGrid(*np.meshgrid(xs, ys, zs, indexing="ij")).cast_to_unstructured_grid()
m = femorph_solver.Model.from_grid(grid)
m.assign(
ELEMENTS.HEX8(integration="enhanced_strain"),
material={"EX": E, "PRXY": NU, "DENS": RHO},
)
# Full clamp at x = 0.
pts = np.asarray(m.grid.points)
clamped = np.where(pts[:, 0] < 1e-9)[0]
m.fix(nodes=(clamped + 1).tolist(), dof="ALL")
# Total mass for the running-sum normalization.
total_mass = RHO * L * WIDTH * HEIGHT
print("Cantilever beam — modal participation factors")
print(f" L = {L} m, cross = {WIDTH} × {HEIGHT} m, ρ = {RHO} kg/m³")
print(f" total mass M_total = ρ·L·A = {total_mass:.3f} kg")
Cantilever beam — modal participation factors
L = 4.0 m, cross = 0.05 × 0.05 m, ρ = 7850.0 kg/m³
total mass M_total = ρ·L·A = 78.500 kg
Modal solve + grab the consistent mass matrix#
N_MODES = 12
res = m.solve_modal(n_modes=N_MODES)
freqs = np.asarray(res.frequency, dtype=np.float64)
shapes_dof = np.asarray(res.mode_shapes, dtype=np.float64)
# ``mode_shapes`` is shaped ``(n_dof, n_modes)``. Each column is a
# mass-normalised eigenvector φ_i with φ_i^T · M · φ_i = 1.
M = m.mass_matrix()
n_dof = M.shape[0]
Build the X / Y / Z influence vectors#
r^(d) is 1 on every DOF aligned with direction d, 0 elsewhere. DOFs are interleaved (UX, UY, UZ) per node — read them off the DOF map.
Compute Γ and M_eff for every mode × every direction#
directions = (("X", r_x), ("Y", r_y), ("Z", r_z))
gamma = np.zeros((N_MODES, 3), dtype=np.float64)
m_eff = np.zeros((N_MODES, 3), dtype=np.float64)
for i in range(N_MODES):
phi = shapes_dof[:, i]
# Mass-normalised: φ^T M φ = 1, so Γ = φ^T M r and M_eff = Γ²
M_phi = M @ phi
modal_mass_i = float(phi @ M_phi) # ≈ 1 for normalised modes
for d_idx, (_, r) in enumerate(directions):
L_i = float(phi @ M @ r) # = modal-load coefficient
gamma_i = L_i / modal_mass_i
gamma[i, d_idx] = gamma_i
m_eff[i, d_idx] = gamma_i**2 * modal_mass_i
cum_eff = np.cumsum(m_eff, axis=0)
cum_pct = cum_eff / total_mass * 100.0
print()
print(
f"{'mode':>4} {'f [Hz]':>10} {'Γ_X':>10} {'Γ_Y':>10} {'Γ_Z':>10} "
f"{'M_eff,X [kg]':>12} {'M_eff,Y':>9} {'M_eff,Z':>9} "
f"{'cum_X %':>9} {'cum_Y %':>9} {'cum_Z %':>9}"
)
print(" " + "-" * 130)
for i in range(N_MODES):
print(
f"{i + 1:>4} {freqs[i]:>10.3f} "
f"{gamma[i, 0]:>+10.4f} {gamma[i, 1]:>+10.4f} {gamma[i, 2]:>+10.4f} "
f"{m_eff[i, 0]:>11.3f} {m_eff[i, 1]:>8.3f} {m_eff[i, 2]:>8.3f} "
f"{cum_pct[i, 0]:>8.2f}% {cum_pct[i, 1]:>8.2f}% {cum_pct[i, 2]:>8.2f}%"
)
print()
print(
f" total M_eff after {N_MODES} modes: "
f"X = {cum_pct[-1, 0]:.1f} %, "
f"Y = {cum_pct[-1, 1]:.1f} %, "
f"Z = {cum_pct[-1, 2]:.1f} % (of M_total = {total_mass:.3f} kg)"
)
mode f [Hz] Γ_X Γ_Y Γ_Z M_eff,X [kg] M_eff,Y M_eff,Z cum_X % cum_Y % cum_Z %
----------------------------------------------------------------------------------------------------------------------------------
1 2.554 -0.0000 -6.8970 +0.7110 0.000 47.568 0.506 0.00% 60.60% 0.64%
2 2.554 +0.0000 -0.7110 -6.8970 0.000 0.506 47.568 0.00% 61.24% 61.24%
3 16.005 -0.0000 +3.7969 -0.5974 0.000 14.417 0.357 0.00% 79.61% 61.69%
4 16.005 -0.0000 +0.5974 +3.7969 0.000 0.357 14.417 0.00% 80.06% 80.06%
5 44.825 +0.0000 -2.2505 -0.1440 0.000 5.065 0.021 0.00% 86.51% 80.09%
6 44.825 -0.0000 +0.1440 -2.2505 0.000 0.021 5.065 0.00% 86.54% 86.54%
7 87.882 +0.0000 -1.2096 +1.0682 0.000 1.463 1.141 0.00% 88.40% 87.99%
8 87.882 +0.0000 -1.0682 -1.2096 0.000 1.141 1.463 0.00% 89.86% 89.86%
9 145.383 +0.0000 -0.9966 +0.7655 0.000 0.993 0.586 0.00% 91.12% 90.60%
10 145.383 +0.0000 -0.7655 -0.9966 0.000 0.586 0.993 0.00% 91.87% 91.87%
11 187.626 -0.0000 -0.0000 +0.0000 0.000 0.000 0.000 0.00% 91.87% 91.87%
12 217.394 -0.0000 +0.6767 +0.7763 0.000 0.458 0.603 0.00% 92.45% 92.64%
total M_eff after 12 modes: X = 0.0 %, Y = 92.5 %, Z = 92.6 % (of M_total = 78.500 kg)
Verify the partition-of-unity property#
Sanity check: a sufficient mode count must capture nearly the full mass in every direction. Twelve modes on a slender beam usually clear 90 % in the bending directions.
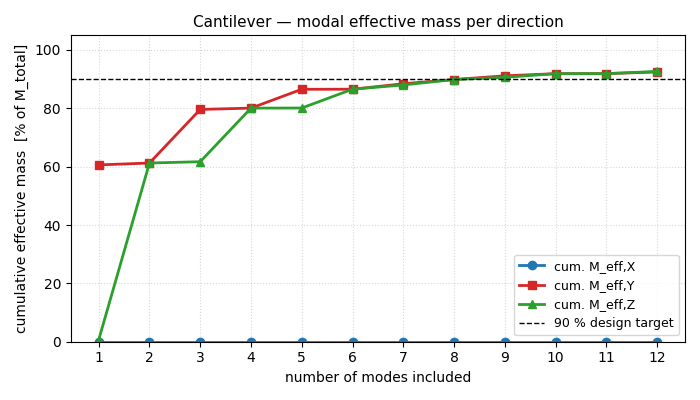
Render the cumulative effective-mass curve#
import matplotlib.pyplot as plt # noqa: E402
fig, ax = plt.subplots(1, 1, figsize=(7.0, 4.0))
mode_idx = np.arange(1, N_MODES + 1)
ax.plot(mode_idx, cum_pct[:, 0], "o-", color="#1f77b4", lw=2, label="cum. M_eff,X")
ax.plot(mode_idx, cum_pct[:, 1], "s-", color="#d62728", lw=2, label="cum. M_eff,Y")
ax.plot(mode_idx, cum_pct[:, 2], "^-", color="#2ca02c", lw=2, label="cum. M_eff,Z")
ax.axhline(90.0, color="black", ls="--", lw=1.0, label="90 % design target")
ax.set_xlabel("number of modes included")
ax.set_ylabel("cumulative effective mass [% of M_total]")
ax.set_title("Cantilever — modal effective mass per direction", fontsize=11)
ax.set_xticks(mode_idx)
ax.set_ylim(0.0, 105.0)
ax.legend(loc="lower right", fontsize=9)
ax.grid(True, ls=":", alpha=0.5)
fig.tight_layout()
fig.show()
Take-aways#
print()
print("Take-aways:")
print(
" • Modal participation factor Γ_i = (φ_i^T M r) / (φ_i^T M φ_i) "
"answers 'how strongly does mode i respond to base excitation in direction d?'."
)
print(
" • Effective modal mass M_eff,i = Γ_i² · (φ_i^T M φ_i) sums to the "
"total mass of the structure when summed over ALL modes."
)
print(
" • The first transverse-bending mode dominates one direction (~60-70 %) "
"and barely contributes to the others — a single number tells you which "
"modes can be skipped per excitation axis."
)
print(
" • Design codes (ASCE 7, Eurocode 8) usually require ≥ 90 % cumulative "
"effective mass per direction — read directly off the table above to "
"decide n_modes for a response-spectrum analysis."
)
Take-aways:
• Modal participation factor Γ_i = (φ_i^T M r) / (φ_i^T M φ_i) answers 'how strongly does mode i respond to base excitation in direction d?'.
• Effective modal mass M_eff,i = Γ_i² · (φ_i^T M φ_i) sums to the total mass of the structure when summed over ALL modes.
• The first transverse-bending mode dominates one direction (~60-70 %) and barely contributes to the others — a single number tells you which modes can be skipped per excitation axis.
• Design codes (ASCE 7, Eurocode 8) usually require ≥ 90 % cumulative effective mass per direction — read directly off the table above to decide n_modes for a response-spectrum analysis.
Total running time of the script: (0 minutes 0.549 seconds)