Note
Go to the end to download the full example code.
HEX8 — cantilever plate static analysis#
Static analysis of a cantilever plate under a distributed tip load.
This example walks through the full
femorph_solver.Model.solve() → StaticResult →
femorph_solver.io.static_result_to_grid() → pyvista rendering loop and
checks static equilibrium via StaticResult.reaction.
Euler–Bernoulli beam theory is included as a back-of-envelope
reference; HEX8 is a first-order hex with full 2 × 2 × 2 Gauss
integration, which exhibits well-known shear locking in thin-bending
problems unless many elements are used through the thickness. The
difference between the two is a feature of the element, not a bug —
swap in HEX20 (quadratic) to recover EB to a few percent with
the same mesh.
from __future__ import annotations
import numpy as np
import pyvista as pv
from vtkmodules.util.vtkConstants import VTK_HEXAHEDRON
import femorph_solver
from femorph_solver import ELEMENTS
Geometry + material#
Steel cantilever, 1 m × 0.1 m × 0.05 m, meshed 40 × 4 × 4 hex (640 HEX8 elements, 1 025 nodes).
E = 2.0e11 # Pa
NU = 0.30
RHO = 7850.0
LX, LY, LZ = 1.0, 0.1, 0.05
NX, NY, NZ = 40, 4, 4
F_TIP = -5.0e3 # N (downward)
xs = np.linspace(0.0, LX, NX + 1)
ys = np.linspace(0.0, LY, NY + 1)
zs = np.linspace(0.0, LZ, NZ + 1)
xx, yy, zz = np.meshgrid(xs, ys, zs, indexing="ij")
points = np.stack([xx.ravel(), yy.ravel(), zz.ravel()], axis=1)
def _node_idx(i: int, j: int, k: int) -> int:
"""0-based VTK point index for the structured mesh."""
return (i * (NY + 1) + j) * (NZ + 1) + k
cells_flat: list[int] = []
for i in range(NX):
for j in range(NY):
for k in range(NZ):
cells_flat.extend(
[
8,
_node_idx(i, j, k),
_node_idx(i + 1, j, k),
_node_idx(i + 1, j + 1, k),
_node_idx(i, j + 1, k),
_node_idx(i, j, k + 1),
_node_idx(i + 1, j, k + 1),
_node_idx(i + 1, j + 1, k + 1),
_node_idx(i, j + 1, k + 1),
]
)
n_cells = NX * NY * NZ
cell_types = np.full(n_cells, VTK_HEXAHEDRON, dtype=np.uint8)
grid = pv.UnstructuredGrid(np.asarray(cells_flat, dtype=np.int64), cell_types, points)
Build the model#
m = femorph_solver.Model.from_grid(grid)
m.assign(ELEMENTS.HEX8, material={"EX": E, "PRXY": NU, "DENS": RHO})
node_nums = np.asarray(m.grid.point_data["ansys_node_num"])
pts = np.asarray(m.grid.points)
# Clamp the ``x = 0`` face in all 3 DOFs.
x0_mask = pts[:, 0] < 1e-9
x0_nodes = node_nums[x0_mask].tolist()
m.fix(nodes=x0_nodes, dof="UX")
m.fix(nodes=x0_nodes, dof="UY")
m.fix(nodes=x0_nodes, dof="UZ")
# Distributed downward tip load.
tip_mask = pts[:, 0] > LX - 1e-9
tip_nodes = node_nums[tip_mask].tolist()
fz_each = F_TIP / len(tip_nodes)
for nn in tip_nodes:
m.apply_force(int(nn), fz=fz_each)
Solve + reaction check#
Model.solve() returns a StaticResult with
displacement, reaction, and free_mask. Reactions are
nonzero only at constrained DOFs; summing FZ at the clamp must
equal -F_TIP to machine precision for a well-posed static solve.
Σ FZ reaction at clamp = 5.0000e+03 N (expected 5.0000e+03)
Tip deflection vs Euler–Bernoulli#
\(\\delta_\\mathrm{EB} = F L^3 / (3 E I)\) with
\(I = b h^3 / 12\) is the slender-beam estimate. With 4 elements
through the thickness, HEX8’s shear locking gives a few percent
error — swap in HEX20 (see HEX20 — uniaxial tension on a 20-node hex) to
remove it entirely.
I_y = LY * LZ**3 / 12.0
delta_eb = F_TIP * LX**3 / (3.0 * E * I_y)
grid = femorph_solver.io.static_result_to_grid(m, res)
tip_mask = grid.points[:, 0] > LX - 1e-9
w_tip_femorph_solver = grid.point_data["displacement"][tip_mask, 2].min()
print(f"Euler-Bernoulli tip deflection = {delta_eb:.3e} m")
print(f"femorph-solver tip deflection (min UZ) = {w_tip_femorph_solver:.3e} m")
print(
f"relative error = {abs(w_tip_femorph_solver - delta_eb) / abs(delta_eb):.2%}"
)
Euler-Bernoulli tip deflection = -8.000e-03 m
femorph-solver tip deflection (min UZ) = -7.348e-03 m
relative error = 8.15%
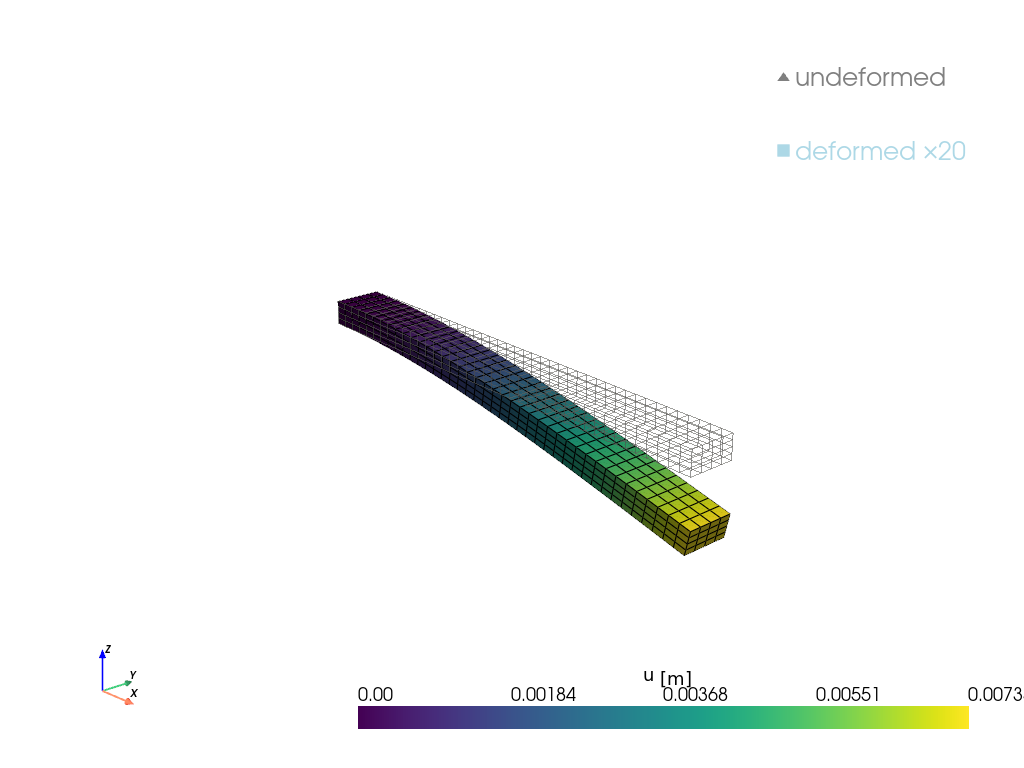
Render the deformed plate, coloured by displacement magnitude#
warped = grid.warp_by_vector("displacement", factor=20.0)
plotter = pv.Plotter(off_screen=True)
plotter.add_mesh(
m.grid,
style="wireframe",
color="gray",
opacity=0.35,
label="undeformed",
)
plotter.add_mesh(
warped,
scalars="displacement_magnitude",
show_edges=True,
cmap="viridis",
scalar_bar_args={"title": "|u| [m]"},
label="deformed ×20",
)
plotter.add_legend()
plotter.add_axes()
plotter.camera_position = [(2.4, -1.6, 1.0), (0.5, 0.05, 0.0), (0.0, 0.0, 1.0)]
plotter.show()
Total running time of the script: (0 minutes 0.346 seconds)