Note
Go to the end to download the full example code.
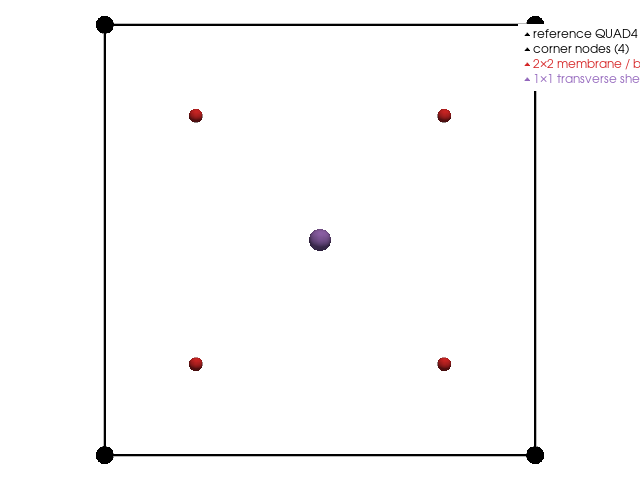
QUAD4 shell reference geometry — Mindlin–Reissner shape functions#
The 4-node flat Mindlin–Reissner shell maps to the natural coordinates \((\xi, \eta) \in [-1, 1]^2\) and carries six DOFs per node — three translations \((u_x, u_y, u_z)\) plus three rotations \((\theta_x, \theta_y, \theta_z)\) — for 24 DOFs per element.
In-plane shape functions (bilinear Lagrange):
The first-order shear-deformation theory (Mindlin 1951; Reissner 1945) assumes the kinematic split
so the bending-membrane coupling is governed by independent rotation DOFs and the through-thickness shear strain is constant across \(z\).
Integration:
Membrane + bending — 2×2 Gauss-Legendre (4 points), exact for the bilinear \(B^T D B\) integrand on the reference square.
Transverse shear — 1×1 selective-reduced Gauss (1 point at the centre), per Malkus & Hughes (CMAME 1978), to suppress shear locking on thin shells.
Drilling-DOF stabilisation: a per-node penalty \(\alpha\, G\, t\, A\) (Allman 1984; Hughes-Brezzi 1989) removes the local rank deficiency when \(\theta_z\) is free.
References#
Mindlin, R. D. (1951) “Influence of rotatory inertia and shear on flexural motions of isotropic elastic plates,” J. Applied Mechanics 18, 31–38.
Reissner, E. (1945) “The effect of transverse shear deformation on the bending of elastic plates,” J. Applied Mechanics 12, A-69–A-77.
Malkus, D. S. and Hughes, T. J. R. (1978) “Mixed finite element methods — Reduced and selective integration techniques: A unification of concepts,” CMAME 15 (1), 63–81.
Allman, D. J. (1984) “A compatible triangular element including vertex rotations for plane elasticity analysis,” Computers & Structures 19 (1-2), 1–8.
Implementation: femorph_solver.elements.quad4_shell.Quad4Shell.
from __future__ import annotations
import numpy as np
import pyvista as pv
Reference quad with both quadrature rules#
corners = np.array([[-1.0, -1.0, 0.0], [+1.0, -1.0, 0.0], [+1.0, +1.0, 0.0], [-1.0, +1.0, 0.0]])
cells = np.hstack([[4], np.arange(4, dtype=np.int64)])
cell_types = np.array([pv.CellType.QUAD], dtype=np.uint8)
ref_quad = pv.UnstructuredGrid(cells, cell_types, corners)
# 2x2 Gauss for membrane + bending
g = 1.0 / np.sqrt(3.0)
gauss_4 = np.array([[a, b, 0.0] for a in (-g, +g) for b in (-g, +g)])
# 1x1 selective-reduced for transverse shear
gauss_1 = np.array([[0.0, 0.0, 0.0]])
Render
plotter = pv.Plotter(off_screen=True, window_size=(640, 480))
plotter.add_mesh(
ref_quad, style="wireframe", color="black", line_width=2.5, label="reference QUAD4 shell"
)
plotter.add_points(
corners, render_points_as_spheres=True, point_size=18, color="black", label="corner nodes (4)"
)
plotter.add_points(
gauss_4,
render_points_as_spheres=True,
point_size=14,
color="#d62728",
label="2×2 membrane / bending",
)
plotter.add_points(
gauss_1,
render_points_as_spheres=True,
point_size=22,
color="#9467bd",
label="1×1 transverse shear",
)
plotter.view_xy()
plotter.camera.zoom(1.3)
plotter.add_legend(face=None, size=(0.27, 0.14), bcolor="white")
plotter.show()
Sanity — N_i at all 5 quadrature locations sums to 1
xi_i = np.array([-1.0, +1.0, +1.0, -1.0])
eta_i = np.array([-1.0, -1.0, +1.0, +1.0])
all_pts = np.vstack([gauss_4, gauss_1])
sums = []
for q in all_pts:
sums.append(sum(0.25 * (1 + xi_i[i] * q[0]) * (1 + eta_i[i] * q[1]) for i in range(4)))
sums = np.array(sums)
np.testing.assert_allclose(sums, 1.0, atol=1e-14)
print(f"5 quadrature locations; max |Σ N_i - 1| = {np.max(np.abs(sums - 1)):.2e}")
print("OK — partition of unity verified at every Gauss point.")
5 quadrature locations; max |Σ N_i - 1| = 1.11e-16
OK — partition of unity verified at every Gauss point.
Total running time of the script: (0 minutes 0.176 seconds)